Drone Simulations
By Shashank Rajiv Moghe
During my Bachelors in Mechatronics, at an event on robotics developments in India, I met Likhin KV, a founder at Haveli UAVs. Haveli UAVs was a startup working on drones in agriculture. I really enjoyed talking to Likhin, and apparently so did he, as he offered me an internship to work with them to explore my interests.
The problem statement was to make a roadmap (and implement as much of it as possible) for the autonomous navigation of drones in GPS-denied outdoor situations. This was an interesting problem statement because outdoor drone navigation is essentially a solved problem, provided you use some form of GPS. This would not be feasible for this case because the locations at which they planned to use the drones had very sparse GPS coverage, and they didn’t want to rely on it more than necessary (this was before NavIC solved this problem). This got me started on simulations with drones and working with a large suite of software and hardware architectures.
With a some trial and error I setup a dockerize’d simulation environment for drones (the base of which you can check out here). This was the SITL base for our entire system, using
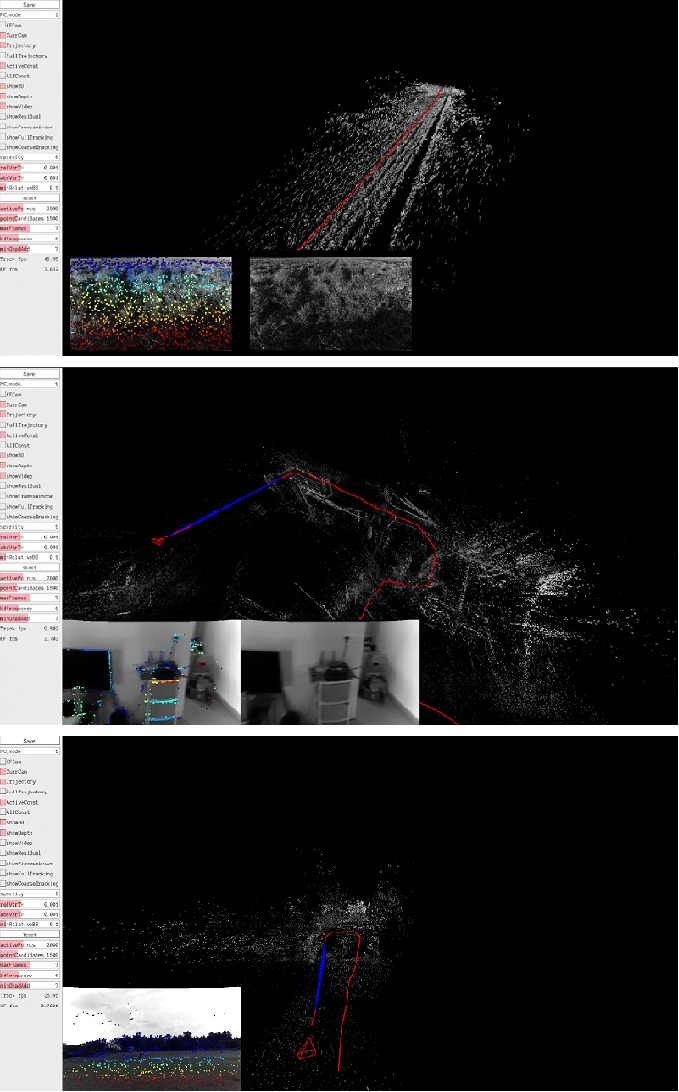
This enabled me to implement livestreaming through the companion computer, geotaging of images, basic image segmentation, simple monocular SLAM (Direct Sparse Odometry (DSO)). DSO needed some modifications to work with the system we had (I worked with Rikin Ramachandran for this). Once we got it working, the algorithm produced fairly noisy point clouds. This however was still good enough to implement a basic version of the A* navigation, requiring a ToF single point LiDAR for ground detection. It was a ready-to-use outdoor, GPS-denied, monocular SLAM system!
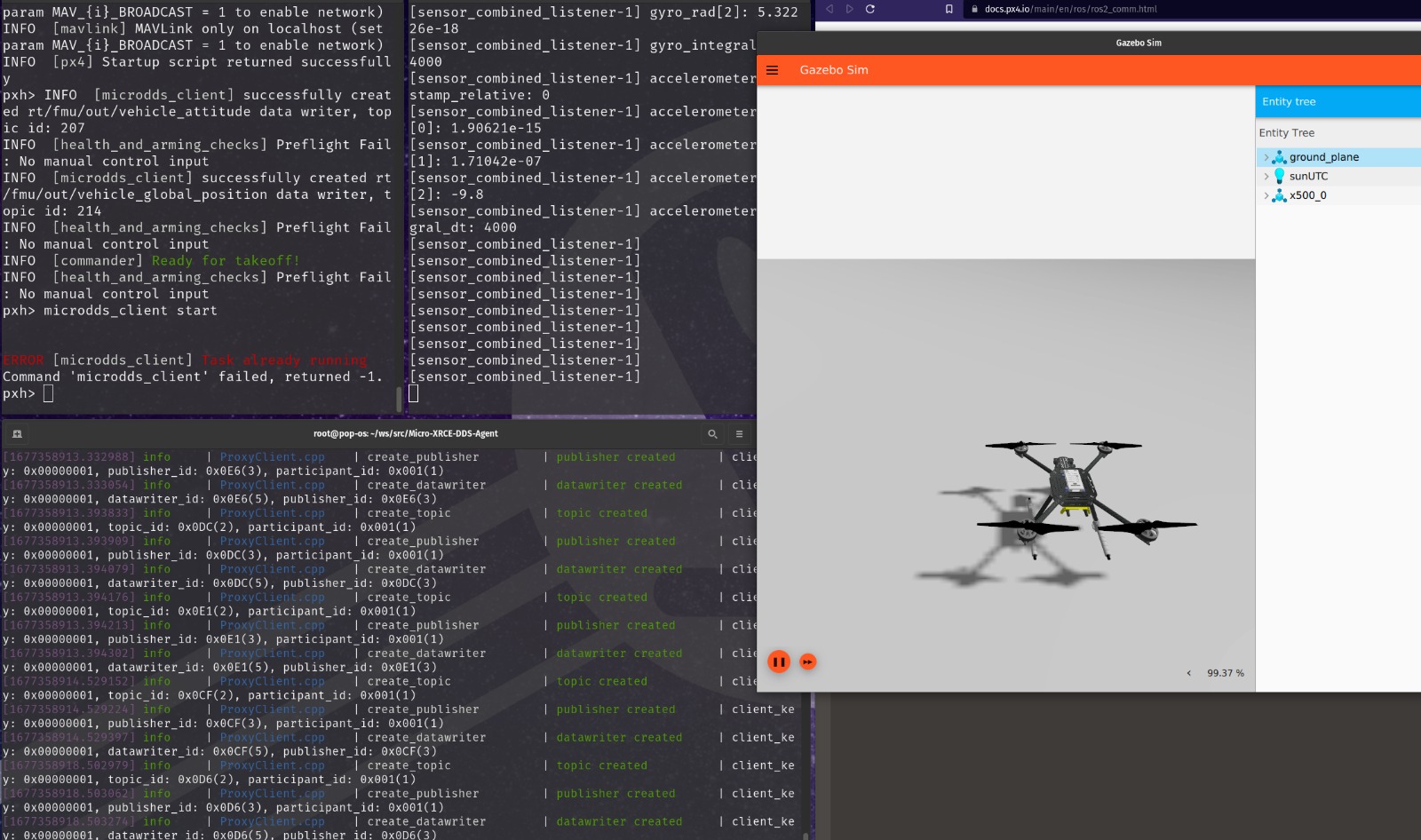
I recently tried implementing a RL based drone controller within Gazebo, starting with the models for the drones and propellers using OpenSCAD, going to simulation of the models with controllers and aiming to essentially create my own drone framework. This led to a lot of pain and frustration and barely worked, so the corpse of the setup is kept here.